The EU-funded ROMANDIC project is advancing robot manipulation of deformable objects, like textiles, by uniting top research institutes, industry, and policymakers to establish a Network of Excellence.



Check the WHITEPAPER on robot dynamic handling of deformable objects
Project ROMANDIC
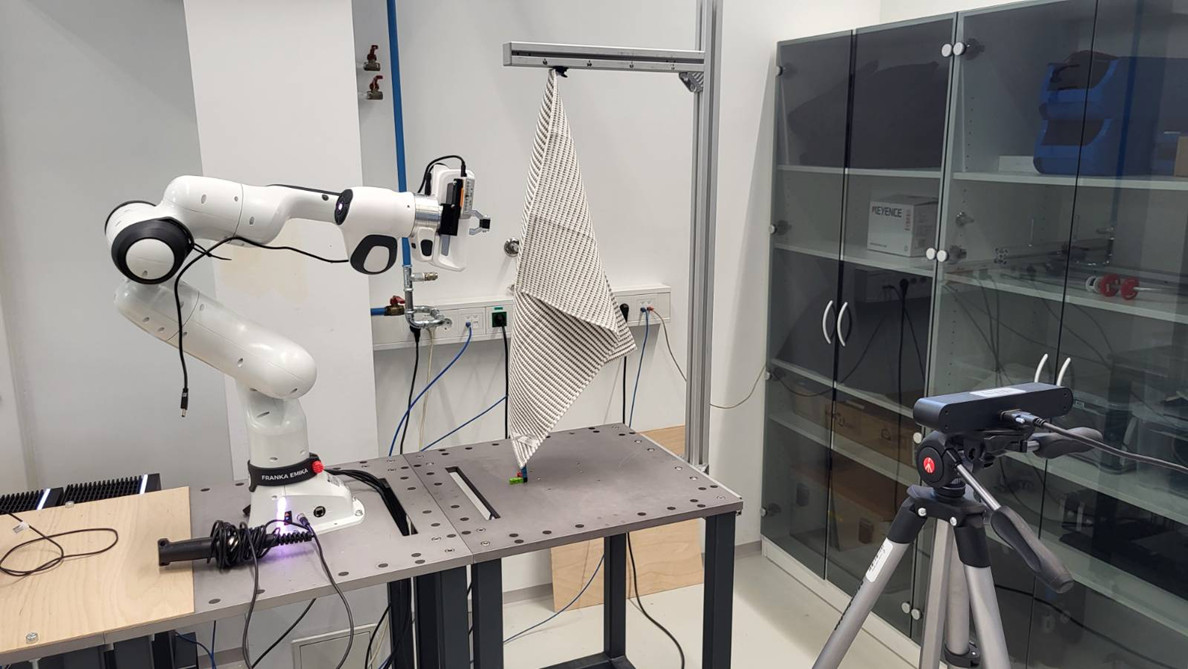
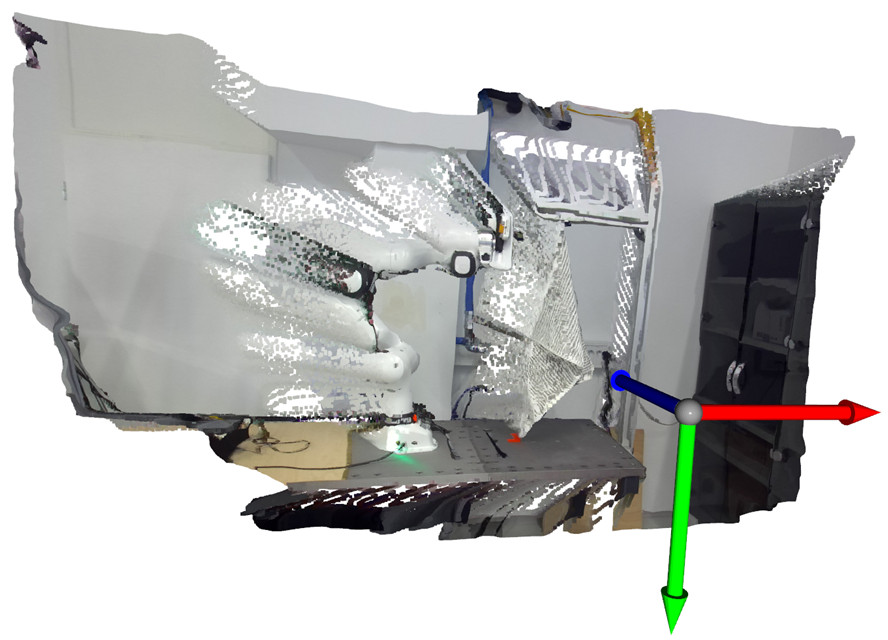
Robot handling of deformable objects – particularly textiles and soft materials – represents one of robotics’ most challenging, promising and rapidly evolving research frontiers. This field has experienced growth driven by advances in accessible robot hardware, the expansion of robotics beyond traditional factory settings, and breakthrough in AI-powered perception and control methodologies. Today, independent research efforts across the globe and throughout Europe are pushing the boundaries of what’s possible in deformable object manipulation.
The potential of this research has gained international recognition. The Jožef Stefan Institute (JSI) in Slovenia, the Karlsruhe Institute of Technology in Germany and the Institut de Robòtica i Informàtica Industrial in Spain also recognise the potential of the field and aim to become key players.
Beyond technical innovation, the EU-funded project ROMANDIC addresses the critical need in our research landscape: connecting isolated efforts into a network of excellence. The project aims to bring together academic institutions, industrial stakeholders, policymakers, and regulators in a collaborative framework that will i) amplify separate research and application efforts, ii) develop a roadmap for the field’s future direction, and iii) establish a formal network of excellence that fosters sustained collaboration.
Through the network of excellence and foremost through dedicated events on the topic, such as staff exchanges, workshops, summer/winter schools and senior researcher seminars, ROMANDIC aims to bring together top European robotics researchers and industries on this topic. Exchange of ideas, continued collaborative work on the topic and integration with similar and related ongoing initiatives will enable us to bring this topic forward.
Objective
We want to combine and bring forward separate efforts on robot handling of deformable objects, such as textiles, by becoming a Network of Excellence (NOE) in Robot Manipulation of Deformables in the truest sense of the definition, as a network of institutions collaborating with each other to pursue excellence in a particular area.
The proposed Twinning project initiative ROMANDIC (RObot MANipulation of Deformables through dynamIC actions) will provide the means to promote this novel and exciting field of research at JSI and internationally, but more importantly, facilitate and consolidate the managing and leading capabilities of (JSI) through knowledge transfer and exchange of best practice, so that it can indeed act as an informal NoE.
Concept and approach
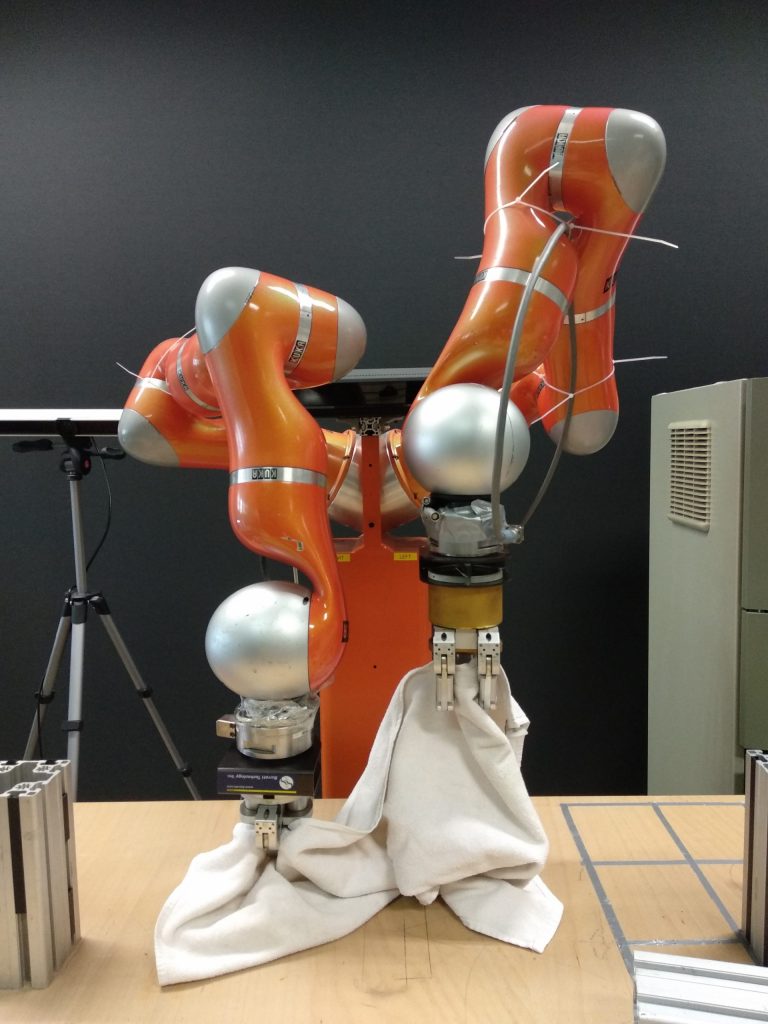
The variability of movements when handling textiles is beyond hand-programmed robot movements. Thus, learning based methods have dominated research in fabric manipulation, often using either human demonstrations, sim-to-real transfer, or both. It has been shown that human demonstrations improve performance also in bimanual folding of garments. Given the complexity of manipulation tasks performed by robots interacting with the physical world, many robot architectures include “task and motion planning” (TAMP) methods that combine symbolic reasoning based on a discrete, abstract, relational representation of states and actions with motion planning and control based on a continuous-space, fine-grained representation.
Complex interaction with the environment and objects has driven the development of novel robotics systems specialized in manipulation. Recent studies on grasping for cloth-like objects point to the need to increase the variety of grasp types and geometries used to manipulate garments to enable more efficient dynamics. At the moment, mainly simple pinch grasps have been used, but grippers that go beyond are receiving increasing interest.
Industrial impact
The proposed project ROMANDIC pushes the limit of performance and physical intelligence because there is still no working robot setup capable of effectively manipulating deformables at near industrial levels. We have the opportunity to create a community and a technological roadmap in the field of robot handling of deformables, which will enable us to make the traditional industrial processes that handle soft deformable materials more agile and sustainable.